


سیستم GNSS
سامانه ماهوارهای ناوبری جهانی (GNSS یا Global Navigation Satellite System) سیستمهایی هستند که به گیرندههای کوچک اجازه میدهند تا موقعیت خود را (طول، عرض و ارتفاع جغرافیایی) با خطای چند متری مشخص کنند. این قابلیت از طریق انتقال امواج رادیویی بین دستگاه و ماهواره صورت میگیرد. ایستگاههای ثابت زمینی میتوانند برای محاسبه بسیار دقیق زمان برای آزمایشهای علمی استفاده شوند.
در حال حاضر، سامانه موقعیتیاب جهانی (GPS) تمام فعال متعلق به آمریکاست که NAVSTAR نام دارد و در حال تقویت است. سامانه ی گلوناس (GLONASS)متعلق به روسیه در حال تقویت است تا به اهداف نظامی و تجاری خود دست یابد. کشور چین اعلام کرده تا سال ۲۰۱۵ سیستم موقعیت یاب محلی Beidou را با سیستم ناوبری جهانی خود یعنی COMPASS ترکیب میکند. سیستم ناوبری اتحادیه اروپا با نام گالیلئو (Galileo) در مرحله توسعهاست و اکنون فعال است. این سیستم از سرویس RTN استفاده می کند . GNSS,RTK مختصات و دقت را به صورت آنی و لحظه ای، دقیق ،بدون محدویت زمان و مکان می دهد. تمامی سیستم های موقعیت یاب GPS, Glonass, Beidou, Galile دارای 3 سیگنال ارسالی هستند. مانند L1,L2,L5 .
GNSSها بر اساس میزان دقتی که دارند همچنین قابلیت نظارت آنها برای استفاده عموم به ردههای زیر تقسیم میشوند:
- -GNSS۱: نسل اول سیستم و ترکیبی است از ماهوارههای ناوبری موجود (GPS یا GLONASS) با ایستگاههای تقویت ماهوارهای (SBAS – Satellite Based Augmentation Systems) یا زمینی (GBAS – Ground Based Augmentation Systems). در آمریکا بخش ماهوارهای سیستم، یک سیستم تقویت گسترده (WAAS – Wide Area Augmentation System) است. در اروپا، سرویس ایستگاههای ناوبری سراسری اروپایی (EGNOS – European Geostationary Navigation Overlay Service)، در ژاپن سیستم تقویت ماهوارهای چندکاره (MASAS – Multi-Functional Satellite Augmentation System). ایستگاههای تقویت زمینی معمولاً از سامانه تقویت محلی (LAAS – Local Area Augmentation System) تشکیل شدهاند.
- -GNSS2: نسل دوم سیستمهای ناوبری هستند که بطور مستقل کاربرد غیرنظامی سیستم را فراهم میکنند (مانند گالیلئو اروپا) این سیستمها دقت و کارایی مورد نیاز کاربردهای غیرنظامی سیستم را در اختیار قرار میدهند. این سامانهها از بسامدهای L1و L2 برای کاربرد غیرنظامی و بسامد L۵ برای همگرایی استفاده میشود.
- Core Satellite: ماهوارههای اصلی سیستم ناوبری. در حال حاضر GPS، Galileo و GLONASS
- SBAS: سیستمهای تقویت سراسری ماهوارهای مانند Omnistar و StarFire
- SBASهای محلی: WAAS آمریکا، EGNOS اروپا، MSAS ژاپن و GAGAN هندوستان
- SNSهای محلی: یا سیستمهای ناوبری ماهوارهای محلی مانند QZSS ژاپن، IRNSS هندوستان و Beidou چین
- GBAS قارهای: مانند GRAS استرالیا DGPS آمریکا (مربوط به سازمان حمل و نقل)
- GBAS محلی: مانند شبکههای CORS
- GBAS محلی نمونه گیری شده از یک ایستگاه اصلاح زمان واقعی جنبشها (RTK) متعلق به GPS
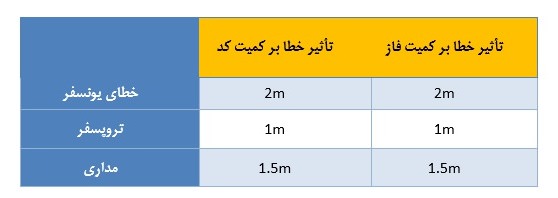
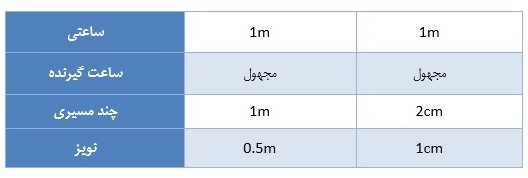
خطاهای GNSS
- اتمسفری
- یونسفر
- تروپسفر
- ماهواره ای
- ساعت
- مداری
- ساعت گیرنده
- چند مسیری
- نویز
انواع گیرنده ها
- تک فرکانسه : برای base line های کوچک L را به دقت میلیمتری و کمتر می رساند تا 5 کیلومتر جواب می دهد.
- گیرنده دستی : دقت در حد 3 متر و برای مشاهدات کد است.
- GPS موبایل
- OBBS
- گیرنده های دو فرکانسه : برای base line های بزرگتر تا 80 کیلومتر که البته لازم به ذکر است امروزه دیگر گیرنده دو فرکانسه وجود ندارد.
- چند فرکانسه : که L1,L2,L5 دریافت می کنند.
ویژگی های گیرنده های دو فرکانسه :
- این گیرنده ها هم فاز L1 و هم فاز L2 را دریافت می کند.
- در مقایسه با گیرنده های تک فرکانسه امکان اندازه گیری base line های بلندتر را برای ما فراهم می کند.
- گیرنده های دو فرکانسه نویز کمتری در داده های آنها وجود دارد.
در گیرنده های دو فرکانسه یکسری خطا مثل خطای تروپوسفر داریم از طرفی اثر تروپوسفر بین 50 تا 150 متر است یعنی اگر اثر تروپوسفر را خوب مدل نکنیم بین 50 تا 150 متر خطا خواهیم داشت.
گیرنده های نظامی (civil)
- امکان اندازه گیری و تعیین موقعیت توسط کد رمز دار
- دارای قابلیت شناسایی و تشخیص سیگنال نویزی یا سیگنال جعلی
کمیت های مشاهداتی GNSS :
- کمیت های مشاهداتی کد (تعیین موقعیت غیر دقیق و آنی):
- CA: که افراد غیرنظامی (گیرنده های موبایل) از این اطلاعات تصحیح نشده استفاده میکنند (دقت 30-5 متر)
- P: مختص افراد نظامی میباشد. (دقت 5-1 متر)
- کمیت های مشاهداتی فاز ( تعیین موقعیت دقیق و غیر آنی):
- L1
- L2
- L5
ابهام فاز : تعداد سیکل های مجهول طی شده از ماهواره تا گیرنده را نامند که بصورت آنی بعلت وجود خطاها حل نمیشوند. اما چنانچه در قسمت کمیت مشاهداتی فاز حل ابهام فاز انجام شود به دقت میلیمتر نیز میتوان رسید.
* تکنیکی برای حذف خطای نویز و چند مسیری وجود ندارد. اما بجز این دو مورد مابقی خطاها به روش تفاضلی قابل حذف میباشند.
روش تفاضلی GNSS
1- استاتیک (Static) – دوگیرنده ثابت: به دو قسمت کلاسیک و مدرن تقسیم میشود.
روش استاتیک : هر دو گیرنده ثابت
روش استاتیک – کلاسیک :
- نیاز به دو گیرنده
- مشاهدات هم زمان
- استقرار base روی نقطه ی معلوم
- استقرار rover روی نقطه ی مجهول
( عملکرد base و rover یکسان است )
- مدت زمان معمول مشاهدات 20 دقیقه است.
- نرم افزار Lgo، Leica Geo Office
- نرخ برداشت اطلاعات در هر دو دستگاه یکسان باشد.
روش استاتیک – مدرن :
- نیاز به base نیست.
- مشاهدات گیرنده دائماً استفاده میشود. که در اینجا به گیرنده Cors میگوییم.
- مدت زمان معمول مشاهدات 7 دقیقه است. (base line کمتر از 15 کیلومتر )
سازمان های داری شبکه :
- سازمان ثبت اسناد و املاک کشور 5
- سازمان نقشه برداری کشور
- سازمان جغرافیایی نیرو های مصلح
- شهرداری ها
نکته: هر چه فواصل زمانی برداشت اطاعات کمتر باشد به مدت زمان کمتری در روش ها نیاز است. (نمونه فواصل زمانی: 1s,5s,10s,15s,30s).
2- RTK (Real Time Kinematic) – (حل ابهام فاز بصورت آنی): به دو قسمت رادیویی و شبکهای تقسیم میشود.
روش RTK :
الف) روش RTK – رایویی :
- استفاده از Base , rover
- استقرار base روی نقطه ی معلوم
- استقرار rover در کنار base
- تولید و ارسال تصیحات به صورت رادیویی به rover
- ارتباط رادیویی base , rover بر مبنای دید مستقیم
- فواصل ارتباطی در محیط شهری معمولاً کمتر از 5 km و در دشت کمتر از 20 km
انواع رادیو ها: 0.5 ولت، 1 ولت، 1.5 ولت، 2 ولت، 5 ولت، 35 ولت که مرسوم ترین آنها 1 و 35 ولتی است.
- برد رادیو وابسته به طول آنتن است.
ب)روش RTK – شبکهای :
- استفاده از cors به جایbase (استفاده از یک گیرنده به جای دو گیرنده)
- ارسال اطلاعات از cors به سرور مرکزی
- تولید تصحیحات نقطه ای و شبکه ای در سرور (تصحیحات نقطه ای که تٍثیر آن بصورت شعاعی است؛ تا شعاع 15کیلومتر معتبر است بعد از 15 کیلومتر اعتبار تصحیحات کاهش یافته و دقت دریافت تصحیحات نیز کاهش مییابد. این بدان معناست که عملاً بعد از 15 کیلومتر خطای سیستماتیک وارد محاسبات می شود). لازم به ذکر است که تا شعاع 50کیلومتری امکان تعیین موقعیت RTK بصورت نقطهای وجود دارد.
- ارائه تصحیحات در بستر اینترنت (GPRS )
- نیاز به IP, port ,user , pass جهت اتصال.
اصل و اساس کار نقشه برداران بطور کلی به 3 بخش تقسیم میشود:
- تهیه ی نقشه
- پیاده سازی نقشه
- تعیین موقعیت
در این 3 بخش از سیستم مختصات WGS84 (مختصات) و سیستم تصویر UTM (دقت) استفاده می شود.
روش های تعیین موقعیت
کینماتیک : تعیین موقعیت اجسام در حال حرکت
استاتیک : تعیین موقعیت اجسام ساکن یا ثابت
تعیین موقعیت مطلق (نقطه ای)کینماتیک: با استفاده از یک گیرنده GPS شروع به تعیین موقعیت به صورت کینماتیک یا در حال حرکت میکنیم.
تعیین موقعیت نسبی کینماتیک(RTK): در این حالت یک گیرنده ی Reference و یک گیرنده ی Rover داریم که reference ثابت و rover در حال حرکت است.
وسایل مورد نیاز در روش RTK :
1-گیرنده BASE
2-گیرنده ROVER
3-کامپیوتر(CONTROLER)
4-رادیو مودم
عیبی که در استفاده از رادیو مودم در این روش وجود دارد این است که در رادیو نیز توپوگرافی روی برد آن تاثیر می گذارد،عیب دیگر این است که برد رادیوها معمولا محدود است و در فاصله بیش از 30 کیلومتر ممکن است رادیو جواب ندهد.از این رو استفاده از یک سیمکارت دارای اینترنت نیز توصیه می شود که برای این منظور سیمکارت را در گیرنده ROVER قرار می گیرد،به این روش نیز RTK NETWORK گویند. حسن این روش آن است که برد ممکن است تا 60-70 کیلومتر هم برسد.دیگر حسنی که این روش دارد آن است که عملا نیاز به خرید 2 گیرنده نداریم و SERVER BASE را دولت یا ارگانهای مخصوص راه اندازی می کنند. تنها عیب این روش این است که : در جایی که کار می کنیم اگر سیمکارت آنتن ندهد دچار مشکل می شویم و اینترنت نیز باید موجود باشد.

تعیین موقعیت مطلق استاتیک:
گیرنده بر روی ایستگاه مستقر شده و ثابت می باشد.
تعیین موقعیت نسبی استاتیک:
هر دو گیرنده ثابت هستند.
تعیین موقعیت نیمه کینماتیک:
اگر یک ایستگاه Reference داشته باشیم ایستگاه Rover در حال حرکت می باشد تا از نقطه ای به نقطه دیگر برود. تفاوت نیمه کینماتیک و کینماتیک:در نیمه کینماتیک ما چند لحظه بر روی نقطه مورد نظر مکث کرده و در زمان حرکت برای رسیدن به نقطه ی Rover ارتباط با ماهواره قطع نمی شود..
تعیین موقعیت شبه کینماتیک :
همان حالت نیمه کینماتیک با این تفاوت که در زمان حرکت برای رسیدن نقطه Rover ارتباط بین ماهواره و گیرنده برقرار نیست فقط در زمان استقرار بر روی نقطه مورد نظر ارتباط برقرار می شود.
ترکیب مشاهداتی:
1.تفاضلی نسبت به گیرنده ها
2.تفاضلی نسبت به ماهواره ها
3.تفاضلی نسبت به زمان
مزیت:
حذف بعضی از خطاهای موجود در مشاهدات
کاهش مقدار خطای موجود در مشاهات
انواع روش های تفاضلی:
1.تفاضلی یگانه: یعنی فقط یک عدد ماهواره یا زمان یا گیرنده داریم.
2.تفاضلی دوگانه: گیرنده- زمان یا گیرنده- ماهواره یا ماهواره-زمان
3.تفاضلی سه گانه: گیرنده – ماهواره-زمان
مزایای تفاضلی یگانه زمان:
1.حذف خطای ابهام فاز
2.کاهش خطای مدار و اتمسفر (تروپسفر و یونسفر)
عیب: هندسه ی آن استحکام بالایی ندارد
مزایای تفاضلی یگانه گیرنده: حذف خطای ساعت ماهواره
مزایای تفاضلی یگانه ماهواره: حذف خطای گیرنده
مزایای تفاضلی دوگانه گیرنده – زمان: حذف خطای ابهام فاز و ساعت ماهواره
مزایای تفاضلی دوگانه ماهواره-زمان: حذف خطای ابهام فاز و ساعت گیرنده
مزایای تفاضلی دو گانه ماهواره-گیرنده: حذف خطای ساعت ماهواره و ساعت گیرنده
مزایای تفاضلی سه گانه گیرنده-ماهواره-زمان: حذف خطای ابهام فاز و ساعت گیرنده و ساعت ماهواره
نویسنده و تهیه کننده : نگار قدیمی


{kind=link}
{kind=link}
{kind=link}
{kind=link}
ثبت ديدگاه